研究报告表明至2021年,全球手术机器人市场规模预计将达到 200 亿美元。据统计,2014年,手术机器人市场规模为 32 亿美元,目前北美市场目前为最大市场。但由于政府医疗投入加大,医疗系统重组和人们对微创手术意识加强,未来市场重心将逐渐往亚洲市场转移。至2021年,全球手术机器人市场规模预计将达到 200 亿美元。
外科手术机器人近年来取得了较大突破
随着机器人产业的不断发展,医疗机器人的发展逐渐受到全球更多高度关注,美国已经把手术治疗机器、假肢机器人、康复机器人、心理康复辅助机器人、个人护理机器人、智能健康监控系统定为未来发展的六大研究方向。
欧洲计划将建立“Robotics for Health-care”网络,促进在欧洲的发展和应用。目前,关于机器人在医疗界中的应用的研究主要集中在外科手术机器人、康复机器人、护理机器人和服务机器人方面。
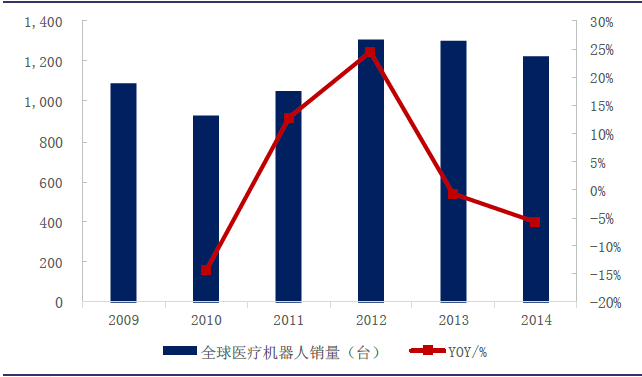
图1:全球医疗机器人销量
处于甜点期的外科手术机器人
从全球来看,手术机器人产业化和技术突破都正处于甜点期,如达芬奇、Rewalk等优秀科技企业涌现,而部分国内自动化企业依托于科研院所的合作、引进国外技术等资源,也在积极研发医疗机器人产品,处于产业化前期阶段。业内人士认为,手术机器人虽然绝对空间更大,但外资份额过高并且处于绝对垄断地位,竞争格局短期不利于国内企业,但长久来看,国内企业手术机器人的份额一定会逐步提高!
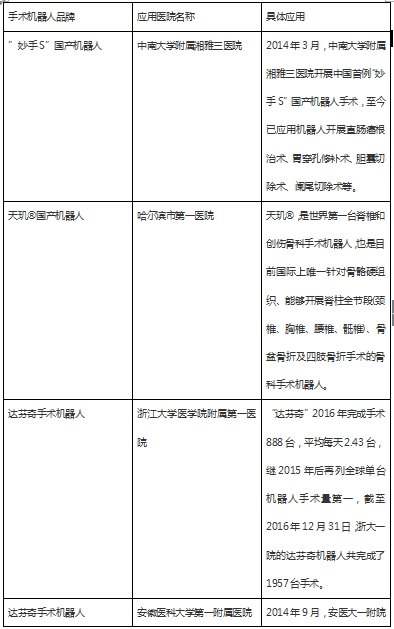
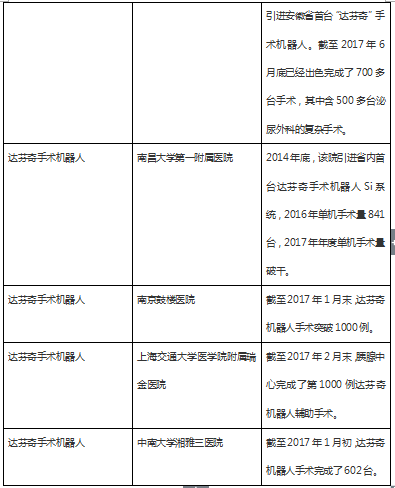
资料显示,中国的达芬奇手术系统的平均单机利用率屡屡创造世界纪录。2017年度平均单机手术量为394台。中国内地年手术量超过250台的医院有45家,全世界单机手术量最高的前八家医院均在中国,南昌大学附属第一医院、浙江大学第一医院、中国人民解放军总医院单机手术量位列世界前三位(表1)。
表1 国内部分医院手术机器人的应用情况
手术机器人典型案例
1994年的伊索被设计用来接受手术医生的指示并控制腹腔镜摄像头。其三个产品伊索-1000,伊索-2000和伊索-3000,可以模仿人手臂功能,实现声控设臵,取消了对辅助人员手动控制内窥镜的需要,为手术医生提供直接、稳定的视野。至 2014 年,外科医师应用“伊索”已在全球做了超过 7.5 万例次微创手术。
1996年初,在伊索机器人的基础上,增加了功能强大的视觉系统,推出主从遥控操作的宙斯机器人。宙斯机器人分为 Surgeon-side 系统和 Patient-side 系统, Surgeon-side 系统由一对主手和监视器构成,医生可以坐着操控主手手柄,并通过控制台上的显示器观看由内窥镜拍摄的患者体内情况。Patient-side由用于定位的两个机器人手臂和一个控制内窥镜位臵的机器人手臂组成。
达芬奇手术机器人是目前全球最成功及应用最广泛的手术机器人,也是手术机器人最高水平。实施手术时主刀医师不与病人直接接触,通过三维视觉系统和动作定标系统操作控制,由机械臂以及手术器械模拟完成医生的技术动作和手术操作。
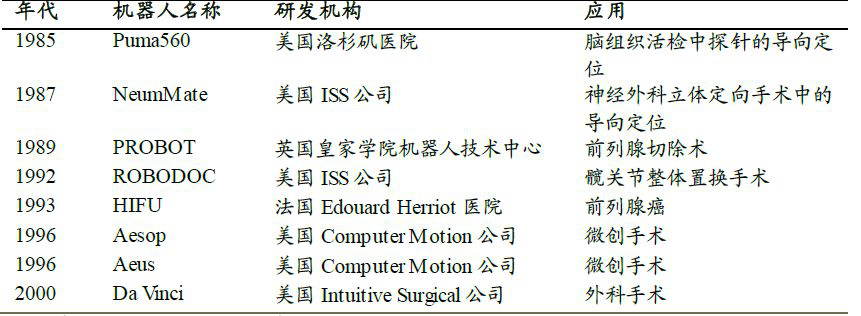
表2 手术机器人经典案例
国内医疗机器人市场蕴含巨大潜力
据统计, 2010-2014年来全国医疗机构床位量以及住院人数CAGR分别达到7.5%和9.6%,同时我国已步入老年化社会,老年人口数量CAGR达到3.54%。此外我国因中风、血栓等导致丧失劳动力人口也在逐渐增多。这些人群对微创、高效、优质的临床服务需求增加,巨大的市场需求将极大推动医疗机器人市场在我国得到快速发展。
国外产品垄断导致国内普及率低
由于目前外科手术机器人生产商的技术和市场垄断,使得手术机器人的购置费用高、手术成本高、维护费用高。这就直接导致我国医院手术机器人的普及率远低于欧美,也不及日韩。目前,国内研究人员正在加紧研制各种手术机器人及其辅助设备、耗材。从长远看,当前的手术机器人技术和市场的垄断地位可能被打破,手术机器人使用成本的下降是趋势。
发展前景较广
随着现代科学技术的发展,机器人将向医疗行业的各个领域渗透,涵盖包括医疗服务、手术、家庭看护和康复等所有层面,开创临床医学的新领域,如各种类型的手术机器人、机器人手术专用工具、虚拟培训系统、智能轮椅、智能康复设备等。另外,随着微型机电技术的不断深入发展,微小型机器人的发展也具有很好的应用前景,它可以直接进入人体器官内部进行手术和其他工作,如完成组织取样、疏通血管、检测、药物放臵、细胞捕捉等工作,在生物科技上发挥重要的作用。
由于机器人在手术的准确性、可靠性和精确性上大大超过了外科医生,机器人技术在医疗手术领域具有广泛的应用前景。国外已经取得了长足的发展和很好的临床应用,国内研究刚开始起步,应加大力度,在一些领域,如机器人辅助正骨、介人式诊断、辅助显微手术、辅助康复等取得突破,以促进我国医疗机器人技术的研究和发展。
达芬奇手术机器人又称“内窥镜手术器械控制系统”
总部位于美国加利福尼亚州,由1995年成立的直觉手术机器人公司(Intuitive Surgical)自行设计、生产及销售。达芬奇机器人 1996 年推出了第一代,2006 年推出的第二代机器人机械手臂活动范围更大了,允许医生在不离开控制台的情况下进行多图观察。2009 年在第二代机器人的基础上增加了双控制台、模拟控制器、术中荧光显影技术等功能,进而推出了第三代达芬奇 Si 系统。第四代达芬奇 Xi 系统在 2014 年推出,灵活度、精准度、成像清晰度等方面有了质的提高,公司在 2014 年下半年还开发了远程观察和指导系统。
目前广泛适用于医院各个科室,泌尿科、心血管外科、胸外科、妇科、五官科、小儿外科等。达芬奇手术机器人在前列腺切除手术上应用最多,现在也已越来越多地应用于心脏瓣膜修复手术中。
 图1 达芬奇手术机器人
图1 达芬奇手术机器人
达芬奇工作方式
其主要由 3 个部分组成:1、医生控制系统;2、三维成像视频影像平台;3、机械臂,摄像臂和手术器械组成移动平台。实施手术时主刀医师不与病人直接接触,通过三维视觉系统和动作定标系统操作控制,由机械臂以及手术器械模拟完成医生的技术动作和手术操作。
 图2 达芬奇手术机器人
图2 达芬奇手术机器人
核心技术
达芬奇手术机器人代表着当今手术机器人最高水平,它有三个关键核心技术:可自由运动的手臂腕部 EndoWrist、3D 高清影像技术、主控台的人机交互设计。
机械手臂的腕部采用能够提供 7 个自由度的 EndoWrist 技术,可以完成人手无法实现的动作,触及范围更广。系统具有振动消除系统和动作定标系统,可保证机械臂在狭小的手术视野内进行精确的操作。此外,机械臂还能完成一些人手无法完成的极为精细的动作,手术切口也可以开得很小,从而缩短患者在手术后恢复的时间。同时还可以提高手术效率,节约费用。
三维影像平台内装有外科手术机器人的核心处理器以及图像处理设备,可由巡回护士操作。达芬奇手术系统的内窥镜可以形成三维立体图像,手术视野图像被放大 10-15 倍,提供真实的 16:9 比例的全景三维图像。
主控台的设计提供了自然坐姿,降低了手术医生的疲劳感,保证长时间手术的正常进行,内置的麦克风能够让手术中的沟通更加有效率。主刀医生坐在控制台中,位于手术无菌区之外,使用双手控制两个主控制器,使用脚控制脚踏板。控制系统中的运动比例缩放功能将使医生手部的自然颤抖或无意的移动减小到最小程度。
达芬奇机器人优缺点
优点:
从患者角度:
1) 手术操作更精确,与腹腔镜(二维视觉)相比,因三维视觉可放大 10-15 倍,使手术精确度大大增加,术后恢复快,愈合好。
2) 曲线较腹腔镜短。
3) 创伤更小,使微创手术指征扩大,减少术后疼痛,缩短住院时间,减少失血量,减少术中的组织创伤和炎性反应导致的术后粘连。
4) 术中对机体损伤大大减小。
从术者角度:增加视野角度,减少手部颤动,机器人“内腕”较腹腔镜更为灵活,能以不同角度在靶器官周围操作,能够在有限狭窄空间工作;使术者在轻松工作环境工作,减少疲劳更集中精力;减少参加手术人员,提高效率,降低人力成本。
缺点:
机器人做外科手术的成本比较高,每台医用机器人的最高成本200多万美元。全世界仅有少数医院可实施机器人手术,因此使机器人手术的成本不能大幅度降低。因此,手术费用明显比常规手术要高。

 >
>